- Sunteți aici:
-
Acasă

-
Regulamente
-
Super AI Track
-
RO
- Regulamente
- Detalii
- Regulamente
- Accesări: 31
Section 1. Game Overview
Stars twinkle in their respective constellations, while planets move through the cosmos along established orbits. As humanity embarks on interstellar travel and explores the vast universe, we will investigate the nature and laws of time and space through more precise observations and experiments. This journey will create a new legend and help us better understand the universe's evolution and development.
This competition requires young students to use their self-made robots to write and debug programs and perform competition tasks at the competition site. The theme of this competition is "Interstellar Legend." The contestants will use robots to explore the mysteries of the universe in a simulated environment, thereby popularizing scientific knowledge and training and improving the contestants' thinking, reaction, hands-on coordination, and team spirit.
Section 2. Requirements for the Team
The teams for the competition are divided into four categories:
- Primary school (junior) group (Grade 3 and below),
- Primary school (senior) group (Grades 4-6),
- Junior high school group,
- Senior high school group.
Each team consists of a contestant and a coach. Contestants must still be registered students until June 2025.
Section 3. Robot
3.1 Requirements for Building Equipment
The event requires contestants to design and build robots to complete the corresponding tasks, but there is no need to build them on-site. Only electronic parts with plastic shells and plastic building blocks can be used to build robots. 3D-printed parts cannot be used. During the competition, the robots must not damage the competition field and task models.
Except for the motor, battery box, sensor, remote controller, and camera, all parts of the equipment prepared by the contestants shall not be assembled by screws or welding, and auxiliary materials such as glue and tape are not allowed. By registering for the competition, it is deemed that the organizing committee has the final right of interpretation of these rules.
3.2 Requirements for Designing Robots
|
Item |
Requirements |
|
Quantity |
1 robot per team. |
|
Specification of the robot |
In the Starship Dock, the robot’s size must not exceed a length and a height of 25cm × 25cm, and must not exceed a width of 25cm, but can be extended after leaving this area. |
|
Controller |
Only one controller is allowed per robot. The controller's input and output ports must be connected to the cable with RJ11 connectors (the same applies to the motor control port). Except for the primary school (junior) group, the controllers of other groups must have a built-in 2.4-inch color LCD touchscreen. |
|
Sensor |
The type and number of sensors allowed to be used by the robot are unlimited. |
|
Remote controller |
The primary school (junior) group can choose to use wireless remote control (2.4G or Bluetooth only) to complete the competition tasks, while the other groups must complete them through automatic control of the program. |
|
Motor |
The total number of motors (including servos) shall not exceed 6, and a single motor can only drive a single grounded wheel. The motors shall not be modified or over-pressurized. (For fairness, the motors used to drive the grounded wheels are limited to 3582, 3581, 3579, 3570, and 9523 models.) |
|
Driving wheels |
The diameter of the robot's wheels (including tires) used for landing shall not exceed 70mm, and the width shall not exceed 25mm. |
|
Structure |
When building a robot, you must use standard 10 mm plastic building blocks with design dimensions. You may not use 3D-printed parts or auxiliary connecting materials such as screws, bolts, rivets, glue, tape, etc. |
|
Battery |
The rated input voltage of robots in the primary school (junior) group shall not exceed 6V, and the rated input voltage of robots in the primary school (senior) group, junior high school group, and high school group shall not exceed 9V. Robots are not allowed to have boost circuits. |
|
Roll call and check |
Contestants will be allowed to bring the complete robot to the roll call of the first-round game. However, the robot must pass a comprehensive inspection to comply with relevant regulations. Contestants should adjust the robot's non-compliance before participating in the competition. |
Section 4. Game Procedure
4.1 Entry Order
The Super AI Super Track competition is a points competition. The participating teams draw lots on the spot to determine the grouping and order of competition and take turns playing in the order determined by the draw.
The organizing committee will ensure that every participating team in the same group has the same chance to play, generally not less than two rounds.
When the previous team starts the game, the next team will be notified to wait and prepare.
Teams that do not arrive within the stipulated time will be deemed to have given up the qualification for the competition.
4.2 Programming and Debugging
The participating teams will have at least 60 minutes to debug their robots before the first round. The referee team will adjust the duration of the debugging according to the actual situation and announce it to all participating teams before each round of debugging.
Contestants are required to program and debug in an orderly manner. Contestants who do not comply with the order may be disqualified. Once programming and debugging are complete, all teams must place their robots in a location designated by the referee and keep them there. Contestants are not allowed to touch robots again without permission, otherwise, they will be disqualified.
After the referee signals the start of the game, the team that is still not ready will lose the opportunity to play in this round, but it will not affect the next round.
4.3 Preparations before the Game
When preparing to go on stage, the contestants take their robots and enter the competition area under the guidance of the referee or staff. Teams that fail to arrive within the specified time will be deemed to have forfeited.
When entering the field, contestants should stand near the Starship Dock and put their robots into the Starship Dock. At this time, any part of the robot and its projection on the ground cannot exceed the Starship Dock.
4.4 Start the Game
After the referee confirms that the team is ready, he will issue a countdown start command of "3, 2, 1, start". As the countdown begins, the contestants can slowly approach the robot with their hands. When the contestants hear the "start" command, they can touch a physical button on the controller to start the robot.
Starting a robot before the "Start" command will be considered a "false start" and will result in a warning or penalty. Once a robot is started, players are not allowed to touch the robot (except for reset).
After starting, the robot must not separate parts or drop mechanical parts on the field. The referee will clear the robot parts that accidentally fall off the field at any time. Separating parts for strategic needs is a foul. If the robot completely crosses the field’s boundary due to excessive speed or program error after starting, or throws the items it carries out of the field, the robot and the items shall not return to the field.
4.5 Time Score
If you complete all the basic tasks and random tasks set by each group within the specified time, you can get a "time score". The completion of additional tasks does not affect the "time score". After the game, the players should immediately signal the referee to stop the timing. The remaining time will be calculated according to the interval described below. (Note: The integer part of the remaining time is taken for calculation, 2 seconds for 2.7 seconds, and 10 seconds for 10.3 seconds.)
(1) If the remaining time is less than 3 seconds, the time score is 0;
(2) If the remaining time is 3 seconds ≤ remaining time < 10 seconds, 5 points are added;
(3) If the remaining time is 10 seconds ≤ remaining time < 20 seconds, 10 points are added;
(4) If the remaining time is 20 seconds ≤ remaining time < 30 seconds, 20 points are added;
(5) If the remaining time is ≥ 30 seconds, 30 points are added.
4.6 Reset
To encourage participating teams to improve program stability and optimize competition strategies, a "smoothness score" is set. 50 points of "smoothness score" are automatically obtained when the competition starts. Every time a reset occurs during the entire mission, the "smoothness score" is reduced by 5 points, with a maximum reduction of 50 points.
Each time a reset occurs, the points obtained are reset to zero, the mission model needs to be restored to the initial state, and the robot returns to the Starship Dock and starts again. When a reset occurs, the timing does not stop.
The robot needs to be reset to the Starship Dock in the following situations:
(1) The contestant requests a reset from the referee;
(2) The robot leaves the competition venue;
(3) The contestant touches the mission model or robot without permission;
(4) In an Advanced Mission, the robot does not move along the flight path or the robot leaves the track line.
4.7 End of Game
If the following situations occur, the competition will end upon the referee's whistle and the time will be recorded.
(1) The robot is unable to continue to perform subsequent tasks;
(2) The team completes the "safe return" task;
(3) The team actively signals the referee to end the competition;
(4) The task time limit is reached.
4.8 Final Score
After each game, the team's single-round score is calculated. The total score of the task is scored according to the task completion standard, see the Descriptions of Elementary Missions or Advanced Missions for details. After all rounds of competition are completed, the highest score of each single game is used as the final competition score of the team.
The time score is the number of seconds remaining at the end of the round, refer to the requirements of "Section 4.5 Time Score".
Single-round score = the score for completed tasks + smoothness score + time score.
4.9 Ranking
After all the games in a certain group are over, all teams will be ranked according to their total score. If two teams have the same score, they will be ranked again according to the following criteria:
(1) The team with the higher total score in the two rounds will be ranked higher.
(2) The team with the shorter completed time in the two rounds will be ranked higher.
(3) The team with the fewer reset times will be ranked higher.
(4) The team with the fewer motors and sensors used by the robot will be ranked higher.
Section 5. Descriptions of Elementary Missions
The following description of Elementary Missions only applies to the Primary School (Junior) Group. Teams control the robot to complete tasks by program control or remote control. The robot can arrange the order of completing the tasks by itself. After completing the task, all robots of the team must return to the designated area to end the game.
The competition consists of an automatic period and a remote-control period, totaling 120 seconds, of which the automatic period takes up to 10 seconds and the remote-control period takes up to 110 seconds. During the automatic period, the robot must complete the tasks set in the field through program control; during the remote-control period, the contestants can operate the robot through the remote controller to complete the tasks set in the field. The remote-control period can only start after the automatic period ends.
For the task models, please refer to the diagrams below the task description. Note that the actual task models in the competition may differ. For example, the beams, connector pegs, and other structures may come in different colors or vary slightly in size and height. Contestants should be capable of making adjustments based on the actual conditions.
5.1 Competition Field for the Elementary Missions
5.1.1 Competition field

Figure: Sample Field Map of the Elementary Mission
5.1.2 Specifications of the Field
(1) The layout of the competition field for the Elementary Mission is shown in the figure above. The size of the field is 3000mm in length and 2000mm in width.
(2) There is a circular area in the center of the field that resembles a black hole. The black hole area is composed of three concentric circles with diameters of 800 mm, 500 mm, and 300 mm respectively. The areas composed of the black hole moving from the outermost to the innermost circle, are known as the apparent boundary, the event horizon, and the center of the black hole.
(3) There are multiple mission areas around the venue. Mission area C1 is fixed with the Starship Navigation task, mission area C2 is fixed with the Interstellar Scientific Research task, and the remaining areas A and B are randomly set with task models according to requirements before programming and debugging begin.
(4) There is a Starship Dock at the competition field measuring 250mm in length and 250mm in width, which is the area where the robot starts and ultimately returns. After the competition starts, the robot will depart from the Starship Dock to each mission area to complete the corresponding actions and finally return to the Starship Dock before the timer expires.
5.2 Elementary Robotics Mission
The following are the tasks that robots need to complete in the competition. Among them, "Smooth Departure" and "Starship Navigation" must be completed during the automatic period to be valid, otherwise no points will be scored.
Additional tasks may be set at the competition site and will be announced before the start of debugging. Locations of task models are set in the corresponding areas according to the requirements. If no additional tasks are set for this game, the task will not be scored.
5.2.1 Smooth Departure
(1) The robot leaves the Starship Dock.
(2) At the beginning of the game, the robot's vertical projection completely leaves the Starship Dock (each robot is only recorded once in each round), and 60 points are awarded.
5.2.2 Starship Navigation
(1) The task model consists of a legendary starship, launcher, and control center.
(2) The legendary starship model is fixed in the C1 mission area, and the launcher is set inside the starship.
(3) The robot needs to use the key to touch the launcher so the control center can start the legendary starship.
(4) If the operation sign of the control center lights up, 60 points will be scored.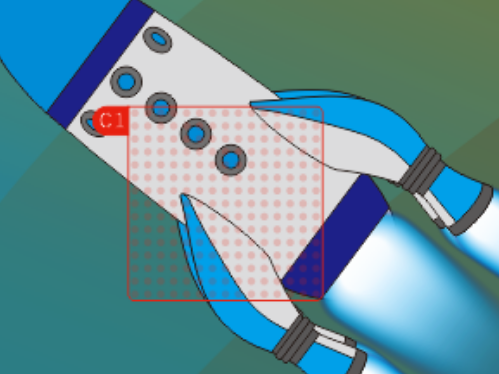
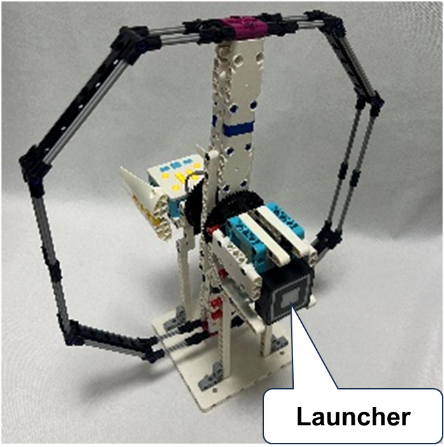
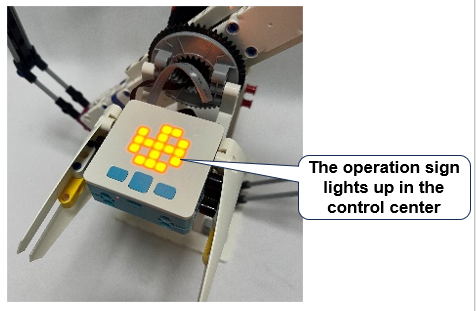
Figure: mission area C1, the initial and completed status of the Starship Navigation task
5.2.3 Space-time Distortion
(1) A space-time distortion model is randomly set up in the field.
(2) The space-time distortion model consists of a platform and two inclined slopes. The dimensions of the platform are 150mm in length, 150 mm in width, and 20mm in height. The dimensions of the slope are 150mm in length, 50mm in width, and 20mm in height.
(3) During the entire process of the robot boarding the space-time distortion model, at least one side of the driving wheel must remain in contact with the slope of the space-time distortion model and the top surface of the platform. Completion of this task will result in 60 points.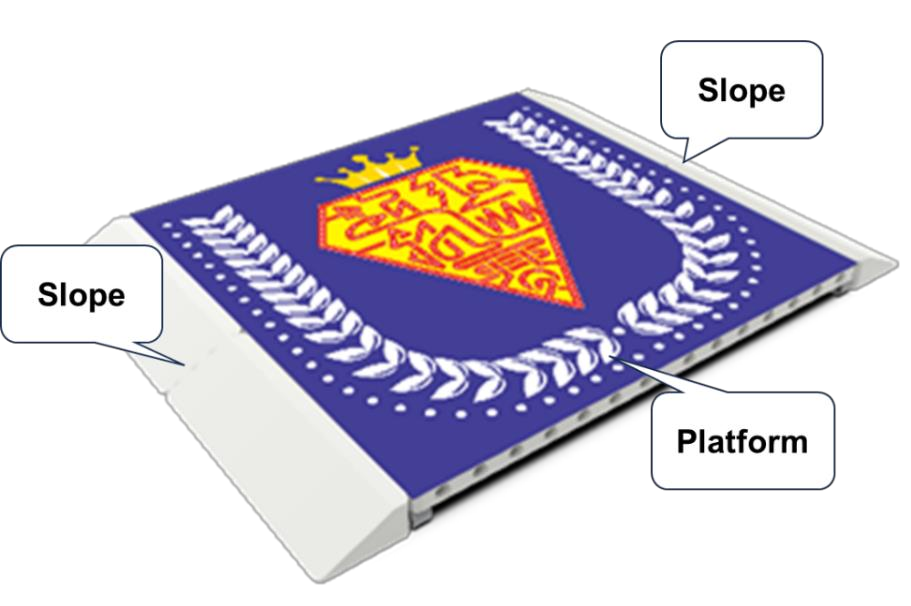
Figure: the model of the Space-time Distortion task
5.2.4 Event Horizon Exploration
(1) There is a detector model placed in each of the 10 mission areas from A1 to A10.
(2) The detector model is a dodecahedron with a length, width, and height no greater than 50 mm.
(3) The robot reaches the front of the detector and delivers it to the black hole in the center of the field. When one detector leaves the initial place, the task is considered completed and 10 points will be scored for each.
(4) If the detector touches the apparent boundaries of the black hole, 10 points will be added for each. If the detector touches the event horizon of the black hole, 20 points will be added for each. If the detector touches the center of the black hole, 30 points will be added for each. If the detector touches two areas at the same time, the area with the highest score will be counted.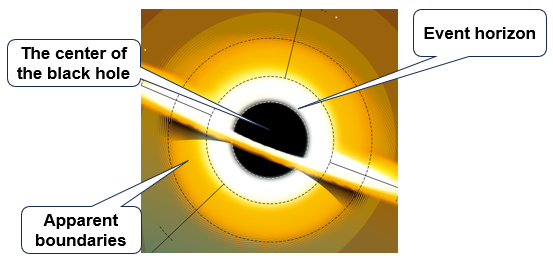
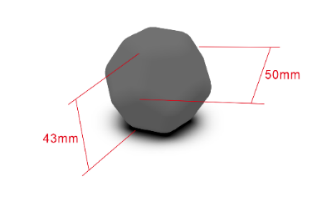
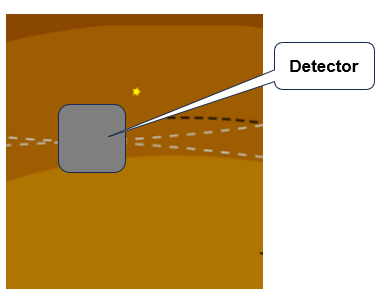
Figure: The structure of the black hole, the detector, and its placement
5.2.5 Interstellar Scientific Research (Additional Task)
(1) Before programming and debugging begin, the referee randomly draws lots to decide whether to add the Interstellar Scientific Research task to the game. If so, the task model of the Interstellar Scientific Research will be covered in mission area C2. The referee will randomly adjust the task model's orientation based on the field's situations.
(2) The model mainly comprises a lever, a scientific research device, and four constellations. The four constellations are set up on the left and right sides of the scientific research device. The four surfaces of the scientific research device are pasted with patterns of the four constellations.
(3) After the robot pushes the operating lever to make the scientific research device rotate more than one circle, the contestant needs to operate the robot to push down the corresponding constellation on the left or right side according to the constellation pattern on the side of the scientific research device facing the operating lever, so that it changes from a vertical state to a horizontal state.
(4) If the robot causes the limiter to engage, 10 points will be scored. If the corresponding constellation on the front of the scientific research device is pushed down to a horizontal state, 50 points will be added. It can be scored if only one corresponding constellation is pushed down among the four constellations. No points will be awarded if more than one or the wrong constellation is pushed down.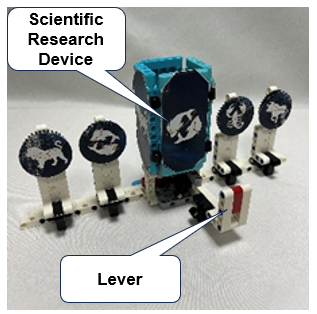

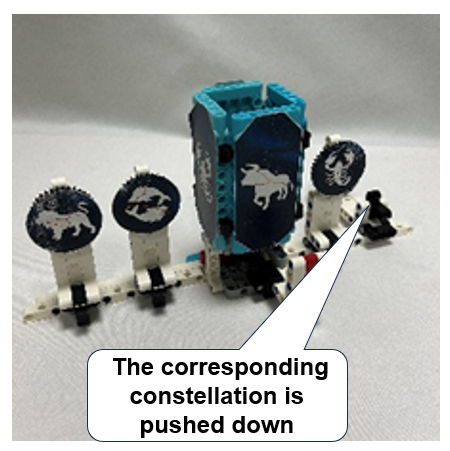
Figure: the initial, intermediate, and completed states of the Interstellar Scientific Research task
5.2.6 Safe Return
(1) The robot must return to the Starship Dock before the timer expires.
(2) The robot's drive wheels are completely projected into the Starship Dock and the "√" sign is displayed on its screen, and 60 points are awarded.
5.3 Randomness of Tasks
"Starship Navigation" is fixed in mission area C1, " Interstellar Scientific Research" is fixed in mission area C2, and the positions of the task models of "Space-time Distortion" and "Event Horizon Exploration" are not fixed. According to the specific task requirements, the referee determines the task model’s position and direction by drawing lots before programming and debugging.
Once the task model’s position and direction in the same team group are determined, they will remain consistent in all rounds.
Session 6. Descriptions of Advanced Missions
The following description of Advanced Missions only applies to the Primary School (Senior), Junior High School, and Senior High School groups.
There is an irregular track line distributed on the field. The task requires the robot to start from the Starship Dock in the specified direction under the automatic program control within the task limit of 180 seconds, move forward without deviating from the flight path, and go to each mission area as quickly as possible to complete the designated task and finally reach the finish area.
For the task models, please refer to the diagrams below the task description. Note that the actual task models in the competition may differ. For example, the beams, connector pegs, and other structures may come in different colors or vary slightly in size and height. Contestants should be capable of making adjustments based on the actual conditions.
6.1 Competition Field for the Advanced Missions
6.1.1 Competition field
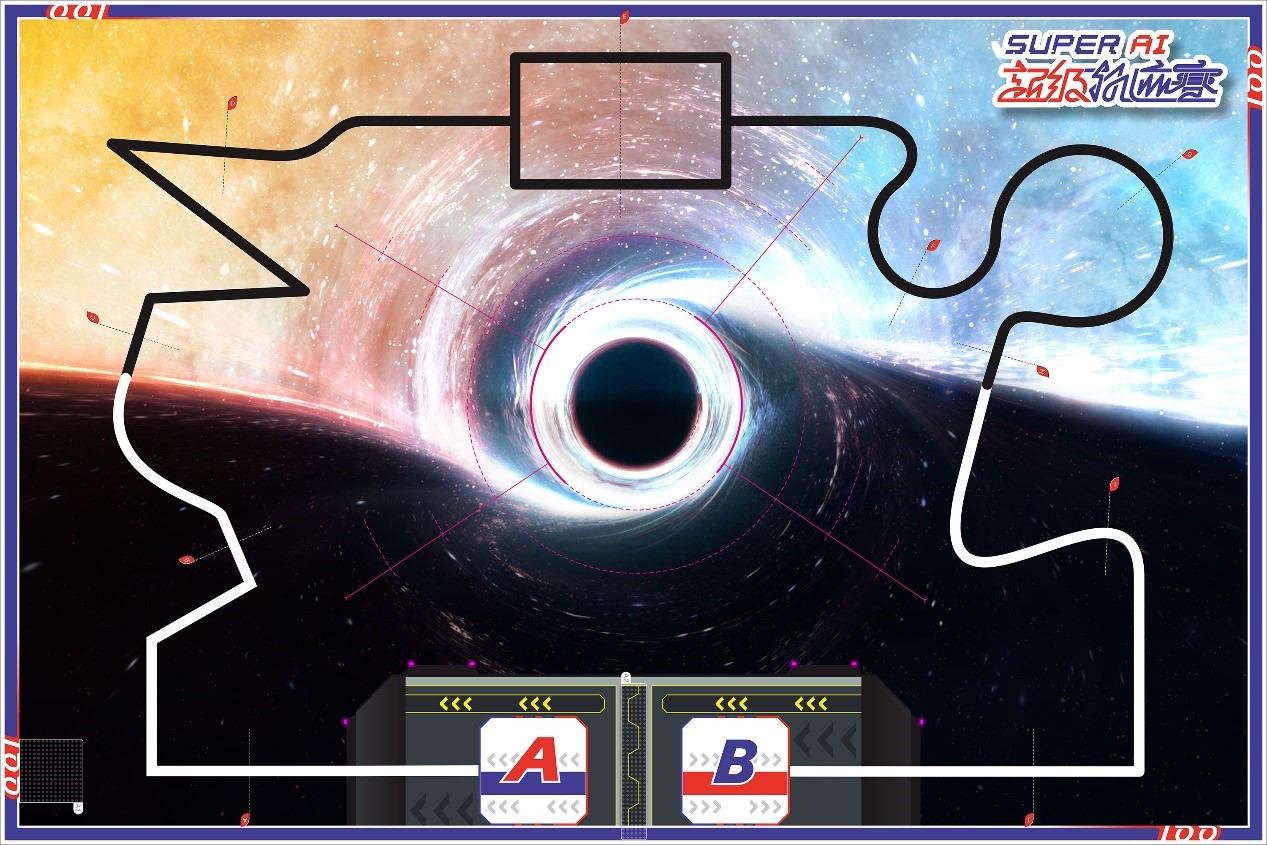
Figure: Sample Field Map of the Advanced Missions
6.1.2 Specifications of the Field
(1) The specific layout of the competition field will be subject to on-site announcement, with the maximum venue size being 3000 mm in length and 2000 mm in width.
(2) There is an irregularly distributed flight path in the field map, which is mainly composed of a track line with a width of 25 mm (±1 mm) (the track line is white and black). The flight path is the route that guides the robot's movement direction.
(3) A black hole area is in the center of the field, composed of three concentric circles with diameters of 800 mm, 500 mm, and 300 mm respectively.
(4) There are two starship docks with a length of 250 mm and a width of 250 mm in the competition venue, marked A and B respectively. They are the starting and arrival areas of the robots. After the competition starts, the robots start from Starship Dock A and travel along the flight path, eventually arriving at Starship Dock B on the other side.
6.2 Advanced Robotics Mission
Basic tasks: Smooth Departure, Flight Path, Space-time Distortion, Event Horizon Exploration, Starship Navigation, Safe Return.
Random tasks: Hatch Unfolding, Supplies Loading.
Additional tasks: Interstellar Scientific Research.
The Primary school (senior) group does not need to do random tasks. The Junior High school group draws 1 of the above random tasks to complete, and the Senior High School group needs to complete all 2 random tasks.
Additional tasks may be assigned on-site for Junior High and Senior High School groups and will be announced before debugging. The task model of the additional task will be set in the corresponding area according to the requirements.
6.2.1 Smooth Departure
(1) The robot leaves the Starship Dock.
(2) If the robot's vertical projection completely leaves the Starship Dock at the beginning (only one record per round of the competition), 60 points will be awarded.
6.2.2 Flight Path
(1) On the flight path of the entire field, there are several dotted lines perpendicular to the flight path, which divide the entire flight path into multiple sections. English letters such as "A, B, C" are marked in order.
(2) The robot must move forward in the direction of the flight path throughout the whole process. If the robot needs to perform other tasks, it can briefly deviate from its current flight path to reverse. (After completing these tasks, it must return to the point of deviation and continue on its original path.) The two driving wheels of the robot must be located on both sides of the flight path or just cover the flight path’s track line.
(3) If any driving wheel of the robot touches a marked line on the flight path, 6 points will be awarded, with a full score of 60.
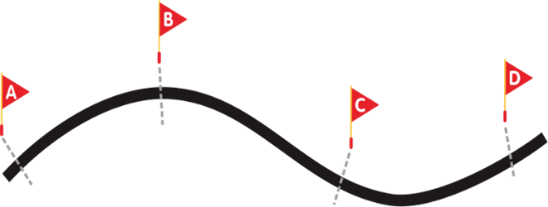
Figure: marked lines on the flight path
6.2.3 Space-time Distortion
(1) The space-time distortion model is fixed at the marked line E and is placed as shown in the figure below.
(2) The space-time distortion model consists of a platform and two transition slopes. The platform measures 150mm in length, 150mm in width, and 20mm in height. Each transition slope is 150mm long, 50mm wide, and 20mm high.
(3) If the robot enters the Space-time Distortion area from the entrance and leaves from the exit, it completes the task and gets 10 points. If the driving wheels on either side of the robot touch the top surface of the two slopes and the platform, an additional 20 points will be awarded.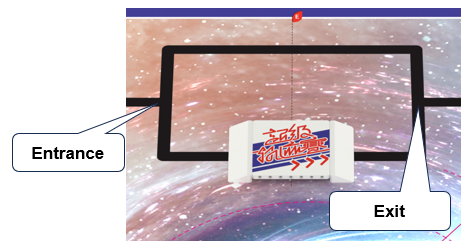

Figure: the model of the Space-time Distortion task
6.2.4 Event Horizon Exploration
(1) Detector models are randomly set up on some flight paths, with at least one set for the primary school (senior) groups and at least two sets for the junior and senior high school groups. Two soft rubber strips with a length of 410 mm, a width of 10 mm, and a height of 10 mm are set at the dividing line between the event horizon and the apparent boundaries of the black hole.
(2) The detector model is a dodecahedron with a length, width, and height not exceeding 50 mm. Before programming and debugging begin, the referee randomly draws a letter representing the marked line on the flight path. After confirmation, the referee will directly cover the detector model at the intersection of the corresponding marked line and the flight path.
(3) When the robot reaches the detector, it picks up the detector and delivers it to the black hole in the center of the field. When the detector leaves the initial placement point, the task is completed and 10 points are scored for each move.
(4) If the detector touches the apparent boundaries of the black hole, 10 points will be added for each; if the detector touches the black hole's event horizon, 20 points will be added for each; if the detector touches the center of the black hole, 30 points will be added for each touch. If the detector touches both areas at the same time, the highest score of the two will be used for extra points.
(5) During the entire process of the robot picking up and delivering the detector, the robot's vertical projection must always remain in contact with the track line and not touch the black hole area, otherwise it will be considered an invalid operation.
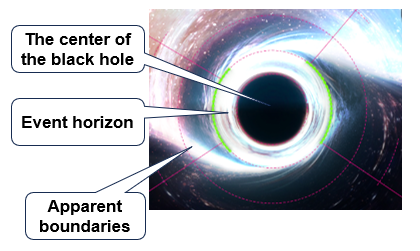
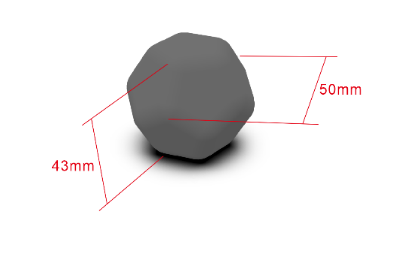
Figure: areas of the black hole, and the format of the detector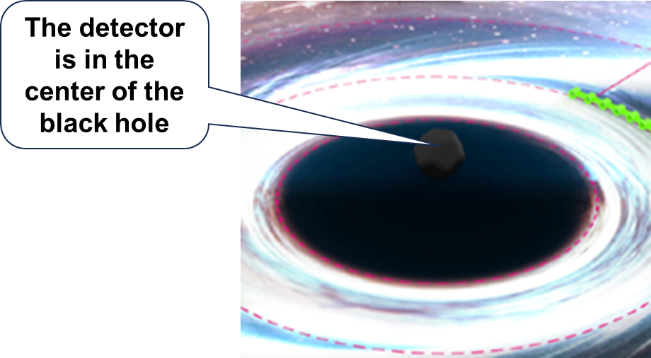
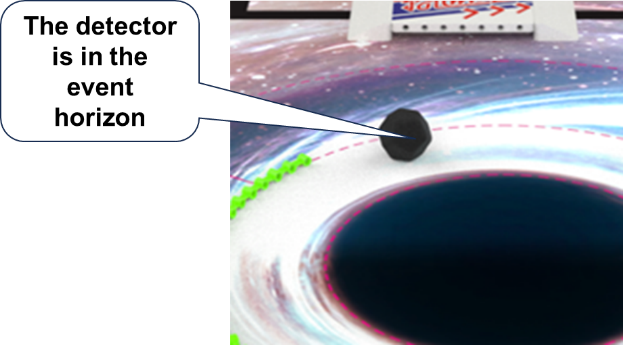
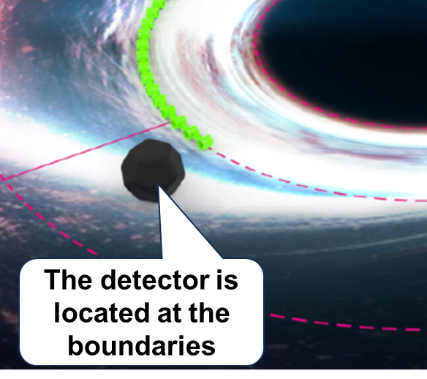
Figure: the three completed states of the Event Horizon Exploration task
6.2.5 Hatch Unfolding
(1) The Hatch Unfolding model consists of hatches, an operating lever, a spaceship, and a platform, with the spaceship placed inside the hatches.
(2) The robot needs to lift the operating lever upward to open the hatches so that the spaceship on the platform rises.
(3) The top of the spaceship is higher than the hatches and always maintains contact with the top surface of the platform, which will score 60 points.
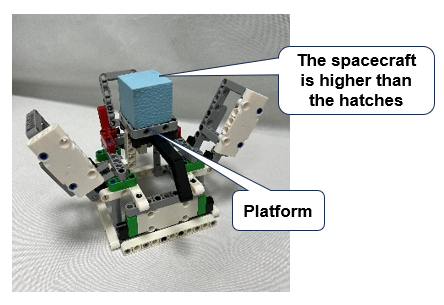
Figure: The initial and completed states of the Hatch Unfolding model
6.2.6 Supplies Loading
(1) The Supplies Loading model consists of supplies (building-block combination), a hook, an operating lever, and a base plate.
(2) The robot needs to push the operating lever forward to make the hook pick up the supplies.
(3) If the supplies are in contact with the hook but not in contact with the base plate, 60 points will be awarded.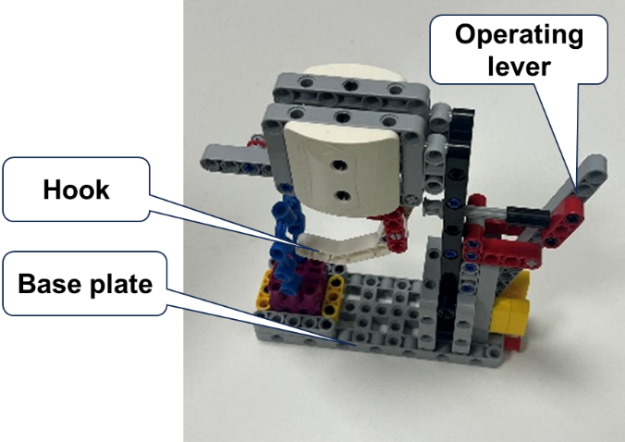
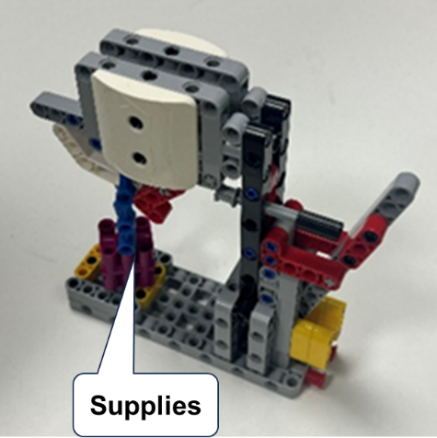
Figure: The initial and completed states of the Supplies Loading model
6.2.7 Starship Navigation
(1) The Starship Navigation model consists of a legendary starship, a launcher, and a control center. The starter always faces the adjacent track line.
(2) The legendary starship model is fixed in mission area A1, and the starter is set inside the starship.
(3) The robot needs to use the key to touch the launcher so that the control center can start the legendary starship.
(4) If the control center lights up the operation sign, 60 points are scored.

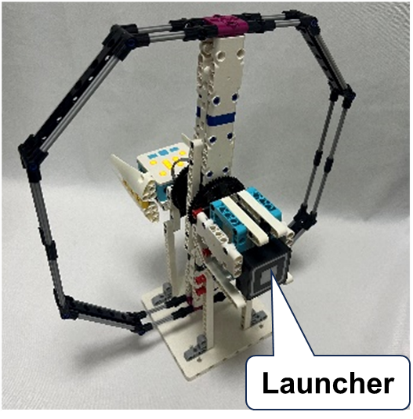
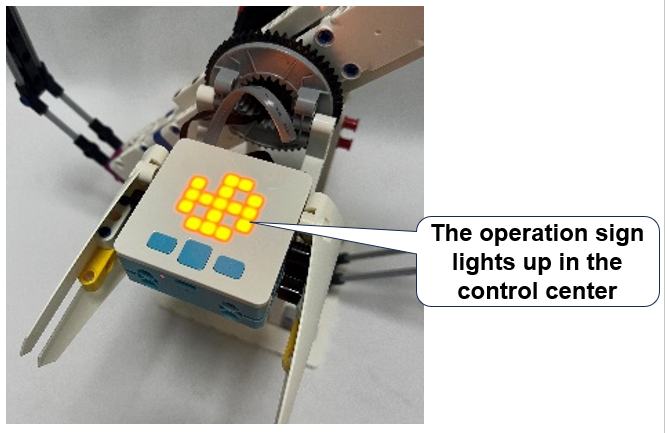
Figure: the mission area A1, the initial and completed states of the Starship Navigation model
6.2.8 Safe Return
(1) The robot moves forward in the order of the letters on the marking line without leaving the flight path and enters the finish area (i.e., Starship Dock B).
(2) If the vertical reflection of the robot's driving wheels is included in the finish area, 60 points will be scored.
6.2.9 Interstellar Scientific Research (Additional Task)
(1) The Interstellar Scientific Research Mission model is fixed in Mission Area A2 next to the finish area. The robot can only perform this task after completing the "Safe Return" task. This task will not be timed, and its completion or failure does not affect the time score.
(2) The model mainly comprises an operating lever, a scientific research device, and four constellations. The four constellations are respectively set up on the left and right sides of the identifier. The four surfaces of the scientific research device are pasted with patterns of the four constellations.
(3) After the robot pushes the operating lever to rotate the scientific research device for more than one circle, it identifies the constellation pattern on the side of the scientific research device facing the robot, and pushes down a corresponding constellation on the left or right side based on the image recognition, so that it changes from a vertical state to a horizontal state.
(4) If the robot causes the limiter to close, 10 points will be scored. If the corresponding constellation on the front of the scientific research device is pushed down to a horizontal state, an additional 50 points will be awarded. Among the four constellations, only one corresponding constellation can be pushed down. If more than one constellation is pushed down, no points will be scored.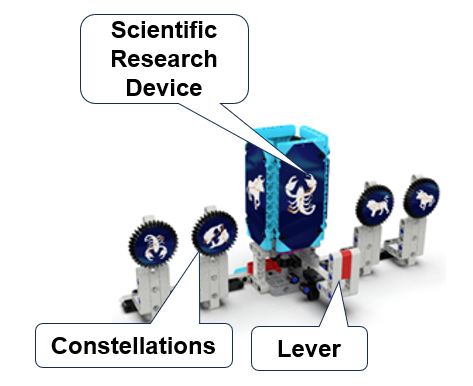
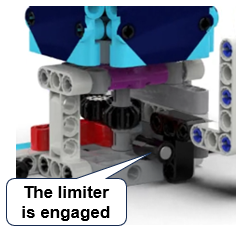
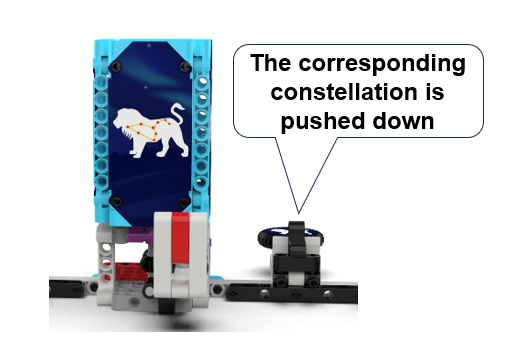
Figure: the initial, intermediate, and completed states of the Interstellar Scientific Research task
6.3 Randomness of Tasks
Except for "Starship Navigation" which is fixed in mission area A1, the additional task "Interstellar Scientific Research" is fixed in mission area A2, "Space-Time Distortion" is fixed at marked line E, and the locations of the task models of "Event Horizon Exploration", "Hatch Unfolding" and "Supplies Loading" are not fixed. Before programming and debugging start, the referee determines the location and direction of the task models by drawing lots, according to the task requirements.
6.4 Time Limit
The duration of a single round is 180 seconds.
6.5 Off the Track Line
During the movement, the robot is not allowed to deviate from the track line of the flight path (that is, the robot's driving wheels must touch or be on both sides of the black line, and must pass through all track lines along the way). If the robot completely deviates from the black line, it must be reset.
For completing tasks other than the "Event Horizon Exploration" task, the robot can temporarily deviate from the track line but must return to the original deviated location before continuing to drive.
- Violations
7.1 Each team is allowed to "false start" the robot once in each round of the mission. If the second "false start" occurs in the group stage, the score for that round will be 0 points, and in the finals, the team will be eliminated directly.
7.2 After the start of the game, if a contestant touches objects or robots on the field without the referee's permission, they will be warned for the first time, and their score for the second time will be 0 points.
7.3 If the coach or parents give verbal instructions that affect the contestants' performance, personally participate in the building and debugging, or touch or repair the works, the score for that round will be recorded as zero once verified.
7.4 After starting, the robot shall not deliberately separate parts or drop parts on the field for strategic needs. If the robot does this, it will be considered as a foul and a warning will be given as determined by the referee. If the violation occurs again, the score for this round will be 0 points. Parts that are separated or dropped due to foul play will be cleared immediately by the referee.
7.5 If a contestant fails to follow the referee's instructions, the referee will assess the severity of the situation and take appropriate action. The contestant may receive a warning, a score of 0 in the preliminary round, elimination from the final, or even disqualification from the event.
Appendix 1.
Score Sheet for the Interstellar Legend (Elementary Mission)
Team:_______________ Group:_________________
|
Fixed tasks |
||||
|
Tasks |
Points |
Round 1 |
Round 2 |
|
|
Automatic Period (10 seconds) |
Smooth Departure |
The robot leaves the Starship Dock, and 60 points will be scored. |
||
|
Starship Navigation |
If the operation sign of the control center lights up, 60 points will be scored. |
|||
|
Remote-control Period (110 seconds) |
Space-time Distortion |
If at least one of the robot's driving wheels passes, 60 points will be scored. |
||
|
Event Horizon Exploration (The highest scoring position is calculated, and a single detector can receive up to 40 points) |
When one detector leaves the initial placement, 10 points will be scored. |
|||
|
If the detector touches the apparent boundaries of the black hole, 10 points will be added for each. |
||||
|
If the detector touches the event horizon of the black hole, 20 points will be added for each. |
||||
|
If the detector touches the center of the black hole, 30 points will be added for each. |
||||
|
Interstellar Scientific Research (Additional task) |
If the limiter is engaged, 10 points will be scored. |
|||
|
If the corresponding constellation is pushed down to a horizontal state, 50 points will be added. |
||||
|
Safe Return |
The robot's driving wheels are fully integrated into the starship dock and display "√", 60 points will be scored. |
|||
|
Total Score for All Tasks |
||||
|
Fluency Score |
The initial fluency score is 50 points, and 5 points will be deducted for each reset. |
|||
|
The Score for Completed Tasks (≤120 seconds, recorded to one decimal place, eg.110.1s) |
||||
|
Time Score (refer to the requirements of "4.5 Time score" about the remaining time range) |
||||
|
Total Score in A Single Round (= score for completed tasks + fluency score + time score) |
||||
|
Total Score of All Rounds |
||||
Referee:________________ Contestant:_______________________
Appendix 2
Score Sheet for the Interstellar Legend (Advanced Mission)
Team:_______________ Group:_________________
|
Fixed tasks |
||||
|
Tasks |
Points |
Round 1 |
Round 2 |
|
|
Basic tasks |
Smooth Departure |
The robot leaves the Starship Dock A, scoring 60 points. |
||
|
Flight Path |
For each line where the drive wheel touches the markings, scoring 6 points. |
|||
|
Space-time Distortion |
The robot enters the area from the entrance and leaves from the exit, scoring 10 points. |
|||
|
The robot's driving wheels contact the top surface of the slope and platform, scoring 20 points. |
||||
|
Event Horizon Exploration (The highest scoring position is calculated, and a single detector can obtain up to 40 points.) |
When one detector leaves the initial placement, 10 points will be scored for each. |
|||
|
If the detector touches the apparent boundaries of the black hole, 10 points will be added for each. |
||||
|
If the detector touches the event horizon of the black hole, 20 points will be added for each. |
||||
|
If the detector touches the center of the black hole, 30 points will be added for each. |
||||
|
Starship Navigation |
If the operation sign of the control center lights up, 60 points will be scored. |
|||
|
Safe Return |
The vertical reflection of the robot's driving wheels in the Starship Dock B and display "√", scoring 60 points. |
|||
|
Random tasks |
Hatch Unfolding |
If the top of the spacecraft is higher than the hatch and in contact with the platform, score 60 points. |
||
|
Supplies Loading |
If the supplies are in contact with the hook but not in contact with the base plate, score 60 points. |
|||
|
Additional task |
Interstellar Scientific Research |
If the limiter is engaged, 10 points will be scored. |
||
|
If the only correct constellation is pushed down to a horizontal state, 50 points will be added. |
||||
|
Total Score for All Tasks |
||||
|
Fluency Score |
The initial fluency score is 50 points, and 5 points will be deducted for each reset. |
|||
|
The Score for Completed Tasks (≤120 seconds, recorded to one decimal place, eg.110.1s) |
||||
|
Time Score (refer to the requirements of "4.5 Time score" about the remaining time range) |
||||
|
Total Score in A Single Round (= the score for completed tasks + fluency score + time score) |
||||
|
Total Score of All Rounds |
||||
Referee:________________ Contestant:_______________________
Passing states of flight path markers
|
Round |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1st |
||||||||||
|
2nd |
- Detalii
- Regulamente
- Accesări: 823
Mission Challenge LEGO
The goal of this category is to build a robot at the competition and conduct a designated mission on the day of match.
This category is meant for young robotics enthusiasts that want to compete with other participants at a beginner to medium level. The age limit for this category is 16 years.
General specifications
The robot and the solution for the mission must be solved only using a robot built out of Lego Mindstorms devices (RCX, NXT, EV3 or Spike Prime).
Under the rules of the game, teams will have to build at the competition an autonomous robot, that will have to accomplish the mission according to the mission specifications received at the start of the competition while also respecting the specifications in the regulations.
1. Notification
We realize that there are other variations to the rules for Mission Challenge, while there are many similarities between other variants the official Robotics Championship rules posted on the website will be used, for this competition we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
This category is inspired by the games organized by the International Robot Olympiad Committee (IROC). (see more at https://www.iroc.org/2018-rules-1 )
2. Team
2.1. A “team” is composed of one to five participants who will build a robot at the event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves at the competition site to regulation and mission specifications. This robot category does not permit prebuilt robots, kits will be inspected before the start of the category. There will be a predefined time for adjustments and changes to the robots and their programming during the event.
2.3. Each team / robot will receive a check-in number and should have a unique name or identity to be easily recognizable by spectators and officials when they are on the field and when they score. The identification label will be placed on the robot during the technical inspection after the building of the robot is done.
2.4. Each team that has built a robot for this category will have equal chances and number of tries. During the trials, only two members can approach the track, the other team members must follow the trial from the public or remain in the participants area.
3. Robot Construction
3.1. All participants must make their own robot on the competition day, starting from the moment they receive the mission specifications. All participants will start the building phase at the same time only on the referee’s command.
3.2. Size and platform of the playfield will be announced on the day of the trial. The mission which participant should conduct will be announced by the referee or organizer on the day of competition.
3.2. The participating robots may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime), which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.3. Motors with and without rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors or other components are permitted for this tournament.
3.4. Numbers and type of motors will be announced according to the mission given on the competition day. The number won’t exceed the number in the table below.
| Type of motor | Maximum |
| Continuous Revolution Motors | 4 |
| Servo motor | 2 |
| Encoder motor | 2 |
| Stepping motor | 2 |
3.5. Numbers and type of sensors will be announced according to the mission given on the competition day. The number won’t exceed the number in the table below.
| Sensor type | Maximum |
| IR sensors | 4 |
| Ultra-sonic sensors | 2 |
| Touch sensors | 2 |
| Color sensors | 1 |
3.6. The size limitations of the robot will be announced on the day of competition.
3.7. Before starting the game, the referee will describe the mission to a representative of each team. (Ex. Build a robot that can carry a 500g weight for over 1m wall, can dive and pick up the following treasure from the bottom of the water pool, can hit a ball in order to move it to a specific place.)
3.8. The referee will also give a description of the scoring formula used for this event. (Ex. The robot must carry three metal balls across the bridge as quickly as possible. If a robot loses a ball, then a 60 second penalty will be added to the time.)
3.9. The referee will also announce any special restrictions or rules that may be in effect during the event. (Ex. Participants must use no more than three rubber bands.)
3.10. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of technical inspection, and once check-in takes place, the robot or its programming may no longer be modified only in the specific time announced by the referee. Robot battery should also be sufficiently charged once the robot is checked in.
3.11. Participants are required to self check the size of the robot while manufacturing and practicing to ensure there will be no issues at the technical inspection.
3.12. Except the starting point, robots must move autonomously by the program and it cannot be operated by any outer interference for remote control.
3.13. Optionally the robot can be started via a button on the robot or using the official LEGO IR remote control, as shown in Figure 1. No Bluetooth or other wireless control of the robot on the field is permitted unless specifically stated in the mission objective. If the LEGO programmable brick has integrated communication modules they will not be used during this competition unless specifically stated in the mission objective. The referee may inspect the code at any moment during the competition.
.

Figure 1. LEGO IR remote control.
3.14. It is encouraged that robots be decorated or themed with Lego parts.
3.15. Robots should work with an independent electric power supply. No charging cable or external batteries are permitted. The only batteries the robot uses should be the ones that fit in the standard programmable LEGO brick.
3.14. It is encouraged that robots be decorated or themed with Lego parts.
3.15. Robots should work with an independent electric power supply. No charging cable or external batteries are permitted. The only batteries the robot uses should be the ones that fit in the standard programmable LEGO brick.
4. Robot limitations
4.1. Size and weight limitations will be announced on the competition day.
4.2. Height is not restricted.
4.4. When the referee announces a start/stop signal, the robot must act accordingly.
4.5. At the startup the robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss.
4.6. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown on the track or opponents.
4.7. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be checked at the technical inspection stage and may be rechecked at the referee's request at any time during the competition.
4.8. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.9. Robots who will not follow these rules will be disqualified.
4.10. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / surrounding environment and track. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.11. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect, are strictly forbidden.
5. Programming
5.1. The robot must be autonomous. No Bluetooth or other wireless control of the robot on the field is permitted unless specifically stated in the mission objective.
5.2. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / according to the mission specifications. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the trials. Each team will have to pass the technical inspection stage in order to be able to participate further with the robot in the competition. After approval, all teams will necessarily remain in the participant area and wait for instructions from the referee.
The stages of the technical approval process are:
6.1. Checking the size of the robot by placing it on a predefined rectangle that has the maximum size limitation announced in the mission specification. Participants cannot give any objection toward the referee.
6.2. The mass of the robot will be checked by the means of a digital scale. The maximum value of the scales shall be mass announced in the mission specifications.
6.3. If the size or weight of the robot exceeds the mission specifications, participants will be given 1 minute to modify their robot in front of the judge, on a designated desk. If participants fail to fit the standard size, the team can be disqualified.
6.4. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.4. The means of starting the robot will be checked.
6.5. The robot will no longer be retained after approval.
7. The Track
Official Playfield: Size, arrangement and composition of the playfield will be announced on the day of the trial.
7.1. The inside of the track is defined as a white surface with black lines. Other color lines and drawn shapes on the track may be present.
7.2. The playing surface dimensions are not known until the competition day.
7.3. Objects and obstacles may be present on the playing track.
7.4. Bridges, inclined surfaces, and ramps may be part of the track.
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants.
8.2. Construction and practice time given will be at least 2 hours and it will be announced on the competition day.
8.3. Production and Practice time are available until the end of announced practice time; however, they’re not allowed to practice before their seats have been assigned.
8.4. After the end of the production and practice time is announced by the referee, participants must stop their robot and follow the instructions of the referee and staff.
8.5. After technical inspection approval all teams must remain in the competition area.
8.6. Preparation of the game: All participants must place the robot and be ready for the referee's instruction.
8.7. During the trial the time recorded will be stored and displayed on the projector/website. After the first trial there will be repair time.
8.8. The 1st run will begin after the construction and practice time.
8.9. Please stand by the game area after the game. When participants finish their 1st trial, they have to line up and watch all participants’ games until the end of that trial, giving every participant equal time and opportunities.
8.10. Repair Time after the end of 1st run, all participants have 30 minutes to modify their robot and practice.
8.11. The 2nd Run Right after the repair time, the 2nd Run will begin.
8.12. Stand by after the game. If a participant finishes his/her 2nd trial, they will go back to their seats.
8.13. During the contest a team is entitled to 2 interruptions for reprogramming during trials, 5 minutes each (2 interruptions are allowed in the whole game).
8.14. Other breaks are only allowed for emergency mechanical problems and only with the referee's agreement, a maximum of 5 minutes each. This rule is applied only when a trial is taking place. Besides trial’s time, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the trial.
8.15. The participants can choose their own path or sequence of moves on the playing track sequence as long as the start/stop line and mission specifications are respected.
8.16. The lines on the track are for guiding the robot’s orientation. Robots are not obligated to keep following a line if they are not required to achieve the mission’s completion.
8.8. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the trial.
9. Playing the trial
9.1. The Robot’s initial position. At the instructions of the referees, the two teams approach the track to place the robot on the track surface.
9.2. The Start, Stop, Interruption or Continuation of the trial is announced by the referee.
9.4. The start is ordered by the referee in each round. After the start is announced the robot must start immediately without delay.
9.5. If the participant can’t start within 5 counts from the referee's signal, it will be declared as ‘Miss Start’ and they have two more chances to restart for this missed start.
9.6. If the participant starts the robot before the referee’s signal, it is declared as ‘False start’ and they have only one more chance to restart.
9.7. Each team has the right for two restarts in total per trial.
9.8. A trial will be played for a maximum of 2 minutes. It will begin at the referee's command. Robots that couldn’t complete the missions within 2 minutes, will have all points earned within 2 minutes aggregated as the final score for that trial.
9.9. If the participant completes the mission within the time limit, the trial will be finished and the time and points will be registered.
9.10. If the robot doesn’t move, the referee will count 10 seconds and if the robot still can not move, will call it a stop and count the points participants earned until the robot stopped.
9.11. During the trial, the referee can declare a TKO (Technical knockout) without 10 counts when the referee judges that the robot can’t drive properly anymore. (Ex. robot had been stopped over the structure and obstacle, robot drive settled zone repeatedly)
10. The score
10.1 A participant scores points according to the number of successes. The points per each mission will be announced on the competition day via the mission specification paper.
10.2. Ranking is done taking into account factors such as Mission points, time record, penalties and so on.
10.3. Time record is based on the measuring instruments or referee’s timer. (If you are declared as a TKO or Robot is stopped by the referee, the time record will not be accepted as the final score.)
10.4. The final score considered will be the best score out of the 1st and 2nd run.
10.5. The standard of the scoring system is based on quantitative standards: timekeeping, distance record and the number of moving targets, in some special occasions it might include a knock‐out competition or even a subjective evaluation.
10.6. Order of priority of the result Ex) Scores > Time record > Compare the time result.
10.7. Order of priority according to rounds If result is same, winner will be decided after comparing the result of another rounds.
10.8. Order of priority according to Tie-Breaker Better score out of 1st and 2nd round will be accepted as final point, but if tied, the player with better results in the 1st round will win the game.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a trial, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the trial is won by the opposing robot and the defective robot team can continue the repairs until the next trial in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the trial when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a trial. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the trial. The only robot to robot damage is permitted during official trials. If one can not decide who is to blame, the one who will ask for the trial to be stopped will be declared defeated.
11.6. Rematches
During the trial if an expected situation occurs, such as blackout or breakdown of a measuring instrument, the referee can decide to do a rematch.
12. Player Restrictions
12.1. When teams are called to the track for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the trial area to place and take the robot off the track.
During the trial, if the participant violates the rule or interrupts the trial, it will be ended and the result will not be admitted.
12.4. Robot Touch During the trial, if participants touch the robot without judge and supervisor
authorization, it will be declared robot touch and disqualified.
12.5. Repair during the trial During the trial, additional, remove, exchange, changing the toll is prohibited but during the standby, if the participants has additional battery then the team will be disqualified. 5-7-3. Sensor tuning Before the trial begins, if participants try to tune the sensor, will be disqualified
12.6. Disobey of seat allocation If participants practice or play the game at the playfield that they’re not assigned, participants will be disqualified. 12.7. False Start If participants conduct ‘False Start’ twice, participants will be disqualified.
12.8. Miss Start If participants conduct ‘Miss Start’ three times, participants will be disqualified.
14. The Winner
The Champion will be the robot with the most points achieved throughout the game.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of trials. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.
- Detalii
- Regulamente
- Accesări: 785


16. Liability
- Detalii
- Regulamente
- Accesări: 1004
4.1. The robot must stand still for 5 seconds before the start of the match. After 5 second the robot can move.
5.1. The robot must be autonomous.
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room.
7.1. The inside of the ring is defined as the surrounding black area, but also includes the white line. Any surface outside the ring will be called the outside of the ring.

9.1. Robot start position. At the instructions of the referees, the two teams approach the ring to place the robots on the contest surface. The operators will place the robots at the same time on the ring. The Judge will give the signal. After placing, the robots may not be moved anymore. After placing the robot on the ring, the operator and/or the assistant must retreat to the marked safe area.

10.1. A knockdown occurs when a robot is knocked down by its opponent. 2 points shall be added to the opponents score.
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
12. Player Restrictions
12.1. When teams are called to the dohyo for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
14. Championship
The Champion will be the robot with the most most "Yuhkoh" points.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
- Detalii
- Regulamente
- Accesări: 4157
Basic principle are based on the robot sumo rules but construction of the robot may only be comprised of official Lego parts. This category is meant for young robotics enthusiasts that want to compete with other participants at a beginner level. The age limit for this category is 16 years.
General specifications
The goal of the LEGO Sumo category is to make a Sumo robot using Lego Mindstorms devices (RCX, NXT, EV3 or Spike Prime).
Under the rules of the game, teams will compete on a Dohyo (sumo ring) with an autonomous robot, it’s own construction according to the specifications in the regulations.
1. Notification
We realize that there are many variations to the rules for LEGO Sumo Robot; the official Robotics Championship rules posted on the website will be used for this competition and we ask that participants to read and be familiar with this particular rule set at the time of the competition, in order to avoid surprises.
2. Team
2.1. A “team” is composed of one to five students who have built a robot for this event. Each team should also have one adult present with the team. One adult can represent multiple teams if they wish.
2.2. The robot must be an autonomous robot constructed by themselves prior to the competition to the specifications below. This robot category is not a workshop where you may build robots after arrival. There will be limited time for adjustments and changes to the robots and their programming during the event.
2.3. Each team / robot will receive a check-in number and should have a unique name or identity to be easily recognizable by spectators and officials when they are on the field and when they score.
2.4. Each team/robot will be assigned a number on check-in and should have a unique name or identity to be easily recognized by spectators and officials when on the field and when scoring.
2.5. Matches will take place between two teams that have built a robot for this category. During the battles, only one member can approach the ring, the other team members must follow the match from the public.
3. Robot Construction
3.1. The racing robot may only be composed of official Lego parts (for example LEGO Mindstorm kits based on RCX, NXT, EV3 or Spike Prime) , which cannot be held together by any means other than the standard Lego construction methods (no tape, glue, stickers, etc.). No homemade sensors, multiplexers, or modifications to Lego elements are allowed. No modification to Lego parts by gluing, cutting or melting is allowed.
3.2. TWO motors with rotation sensors are allowed, and any other sensors manufactured by Lego may be used. No “made for Lego” third party sensors are permitted for this tournament.
3.4. There will be limited time and space for last minute design improvements and adjustments, however, the robots should be completed at the time of registration, and once check-in takes place, the robot or its programming may no longer be modified. Robot battery should also be sufficiently charged once the robot is checked in.
3.5. The robot must be able to start using the official LEGO IR remote control, as shown in Figure 1, or via a Bluetooth connection. Start and stop commands are only performed by the referee. Other functions other than starting and stopping controlled via the Bluetooth connection are forbidden and the robot code may be inspected by the referee at any moment during the competition.
3.6. It is encouraged that robots be decorated or themed with Lego parts.
4. Robot limitations
4.1. When started on the Dohyo, the robot can’t be more than 15.3x15.3 cm.
4.2. Height is not restricted.
4.3. The maximum mass of the robot shall not exceed 1,505 kg.
4.4. When the referee sends a start/stop signal, the robot must act accordingly.
4.5. The startup robot may expand. It is not allowed to separate the robot into 2 or more pieces. The robot must remain a single centralized robot. Components with a mass of less than 5 grams will not result in loss of the match.
4.6. It is forbidden to use devices that can store liquid, dust, gas or other substances to be thrown to the opponent.
4.7. Devices that throw objects to the opponent are not allowed.
4.7. Sticky substances to improve traction are not allowed. Wheels and other components of the robot that are in contact with the ring should not be able to lift and hold a standard A4 (80mg / m²) sheet for more than 2 seconds. Robots will be screened at the approval stage and may be rechecked at the referee's request at any time during the competition.
4.8. Surface pressure-enhancing devices such as vacuum pumps or magnets / electromagnets are NOT allowed.
4.9. Robots who will not follow these rules will be disqualified.
4.10. All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
4.11. It is forbidden to use devices for jamming opponents, such as radiation sources to saturate sensors, ultrasound transmitters, or other devices with similar effect.
5. Programming
5.1. The robot must be autonomous. Bluetooth or other wireless control of the robot on the field is forbidden with the exception of the communication start/stop command.
5.2 All robots must be autonomous. The autonomous robot movements will have to detect and / or react / attack the movements of the adverse robot. If there are doubts as to the robot's autonomy, the referee has the right to inspect the logical control of the robot.
6. Technical inspection
This step will take place before the beginning of the competition. Each team will have to pass the technical inspection stage in order to be able to participate with the robot in the competition. After approval, all teams will necessarily remain in the competition room or area.
The stages of the technical approval process are:
6.1. Verify the size of the robot by placing a 15.3 x 15.3 cm.
6.2. Weigh the robot on a digital scale. The maximum value of the scales shall be 1.505 kg.
6.3. The wheels of the robot and other parts that are in contact with the track must NOT be able to pick up and hold a standard paper A4 (80g/cm2) for more than 2 seconds.
6.4. Check the operation of the IR sensor or Bluetooth function for both when starting and stopping the robot.
6.5. The robot will no longer be retained after approval.
7. Dohyo (ring of sumo)
7.1. The inside of the ring is defined as the surrounding black area, but also includes the white line. Any surface outside the ring will be called the outside of the ring.
7.2. The playing surface is defined as a 3 mm thick black disc with a diameter of 77 cm.
7.3. A white band is on the outside of the black area and has a width of 2.5 cm.
7.4. A 3.5% tolerance is allowed in the construction of the contest surface.
7.5. There is a safe space outside the ring. This space can be any color, it can be of any material and can have any shape. This area with the ring at its center will be called the ring area.
8. Conduct of the contest
8.1. Robots will be divided into groups according to the number of participants. The competition will take place in the group / quarter / semifinal / final system to allow as many rounds of play as possible for each robot.
8.2. Each match takes place in the best of 3 rounds and will be supervised by 2 referees (1 main referee and 1 assistant), except for the finals where the match is played in the best of 5 rounds. The decisions of the referees must be unanimous and are final, and their challenge leads to disqualification from the match.
8.3. During the contest a team is entitled to 2 interruptions for reprogramming during matches, 5 minutes each (2 interruptions in the contest).
8.4. Other breaks are only allowed for mechanical problems and only with the referee's agreement of maximum 5 minutes each. This rule is applied only when a match is taking place. Besides matches, changes and reprogramming are allowed. Teams are required to appear at the start within 1 minute of receipt of the request, otherwise they will lose the match.
8.5. After approval all teams remain in the competition room / area. Teams can only leave the room / area for repairs. If a team leaves the competition room, it must return within the specified time by the referee. If the robot does not appear on the first call, it loses the match.
9. Playing the match
9.1. Robot start position. At the instructions of the referees, the two teams approach the ring to place the robots on the contest surface. A cross with two opposite arrows placed in the middle divides the sumo ring into four quadrants. Robots must always be placed in two opposite dials according to Figure 2. After the robots have been positioned, the cross is removed, the moment the robots can not be moved.

Figure 2. Placing the robots on the battle ring.
9.2. The Start, Stop, Interruption or Continuation of the match is announced by the referee.
9.3. A match will be played for a maximum of 3 minutes. It will begin and end at the referee's command.
9.4. The start is given by the referee in each round by means of a remote that sends a signal to the robots, who in turn will leave immediately without delay.
9.5. End of the match. When the referee announces the end of the match, the two teams are allowed to lift the robots from the ring.
9.6. A match consists of 3 rounds, each of which lasts for a maximum of 3 minutes, with the possibility of time extension by the referees.
9.7. Extension: an additional match, if requested by the referee, will take up to 3 minutes.
9.8. A team receives a "Yuhkoh" point when they win a round.
9.9. The first team that wins two rounds or receives the first two points "Yuhkoh" until the end of the time limit will win the match.
9.10. If the time limit is reached before a team receives two "Yuhkoh" points the team with the most points will win the match. (for example 1-0 points out of 3 matches).
9.11. If a match is not won by any team during the limit, an additional round will be played. After all options have been exhausted, the winner of the match may be decided by referees by drawing lots or other criteria set by the arbitration panel.
9.12. If one of the two robots does not start, a restart will occur. If the rest of the robot does not leave, the match will be won by the moving robot.
10. The score
10.1. One "Yuhkoh" point will be awarded when:
A. The robot of a team forces the opponent to come out of the ring by pushing or lifting maneuvers. The adverse robot is considered defeated if it touches with any part or component the outer surface on which the ring is placed.
B. The adverse robot comes out of the ring for whatever reason.
C. The adverse robot fails without continuing the round and the team's representative announces this.
10.2. When determining the winner falls to the arbitrators, after exhausting the LEGO Sumo competition criteria, the following considerations are considered:
A. Quality of robot construction and programming.
B. Penalty points accumulated during the match.
C. Team attitude during the match.
10.3. The match is stopped and the round is redone when:
A. Robots spin around each other without visible progress for 10 seconds. Robots are blocked for more than 3 seconds. If it is not clear that the robot is making progress, the observation time can be extended up to 30 seconds.
B. Both robots move without making any progress, stop (at the same time), or stop for 10 seconds without touching. However, if a robot stops moving, after 10 seconds, it will be declared without a fight initiative. In this case the opponent will receive a "Yuhkoh" point.
C. If both robots touch at the same time the outer surface on which the ring is placed and it can not be determined which robot has touched the first exterior, the round will be replayed.
11. Repairs, modifications, unexpected interrupts
11.1. If a robot fails during a match, the Referee will allocate a 1-minute repair interval. This interval can be extended up to 5 minutes with the organizers' agreement. Repairs will be supervised by an assistant referee to avoid changing the robot modules with other non-approved ones.
11.2. If a robot can not be repaired within the specified interval, the match is won by the opposing robot and the defective robot team can continue the repairs until the next match in which they participate and in that case being supervised by a referee / member of the organizing committee.
11.3. Replacement of defective parts can be performed and batteries can be charged during the competition, if necessary.
11.4. A competitor may ask to stop the match when he / she is injured or the robot has suffered damage and the game can not continue.
11.5. Failure to continue a match. When the game can no longer continue due to injury of the competitor or damage to the robot, the competitor who caused the injury or robot's damage or failure will lose the match. The only robot to robot damage is permitted during official matches. If one can not decide who is to blame, the one who will ask for the match to be stopped will be declared defeated.
12. Player Restrictions
12.1. When teams are called to the dohyo for their robot, teams present to the field promptly, and each team has to greet the other with a bow or handshake.
12.2. Players have to behave in a respectful manner, and are not permitted to use profanity or insulting words or actions, or to have their robot use such words or actions. Unsportsmanlike behavior will not be tolerated. Such behavior will result in a violation or disqualification at the judge’s discretion.
12.3. Only one team member may enter the match area to place and take the robot of the dohyo.
13. Judging
13.1. No objections shall be declared against the referees / judges' decisions.
13.2. The lead person of a team can present objections to the organizing committee, before the match is over, if there are any doubts in the exercising of these rules. If there are no Committee members present, the objection can be presented to the judge before the match is over.
14. Championship
The Champion will be the robot with the most "Yuhkoh" points won.
15. Flexibility of Rules
As long as the concept and fundamentals of the rules are observed, these rules shall be flexible enough to encompass the changes in the number of players and of the contents of matches. Modifications or abolition of the rules can be made by the local event organizers as long as they are published prior to the event, and are consistently maintained throughout the event.
16. Liability
16.1. Participating teams are always responsible for the safety of their robots and are liable for any accidents caused by their team members or their robots.
16.2. The Robotics Championship organization and the organizing team members will never be held responsible nor liable for any incidents and / or accidents caused by participating teams or their equipment.



